










This item is archived from our catalog and no longer for sale. This page is available as a reference only.
Pololu 50:1 Metal Gearmotor 37Dx70L mm 12V with 64 CPR Encoder (Helical Pinion)
This gearmotor is a powerful 12V brushed DC motor with a 50:1 metal gearbox and an integrated quadrature encoder that provides a resolution of 64 counts per revolution of the motor shaft, which corresponds to 3200 counts per revolution of the gearbox’s output shaft. The gearbox is composed mainly of spur gears, but it features helical gears for the first stage for reduced noise and improved efficiency. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available without an encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 200 RPM, 200 mA | 21 kg⋅cm (290 oz⋅in), 5.5 A |
Dimensions
 |
|
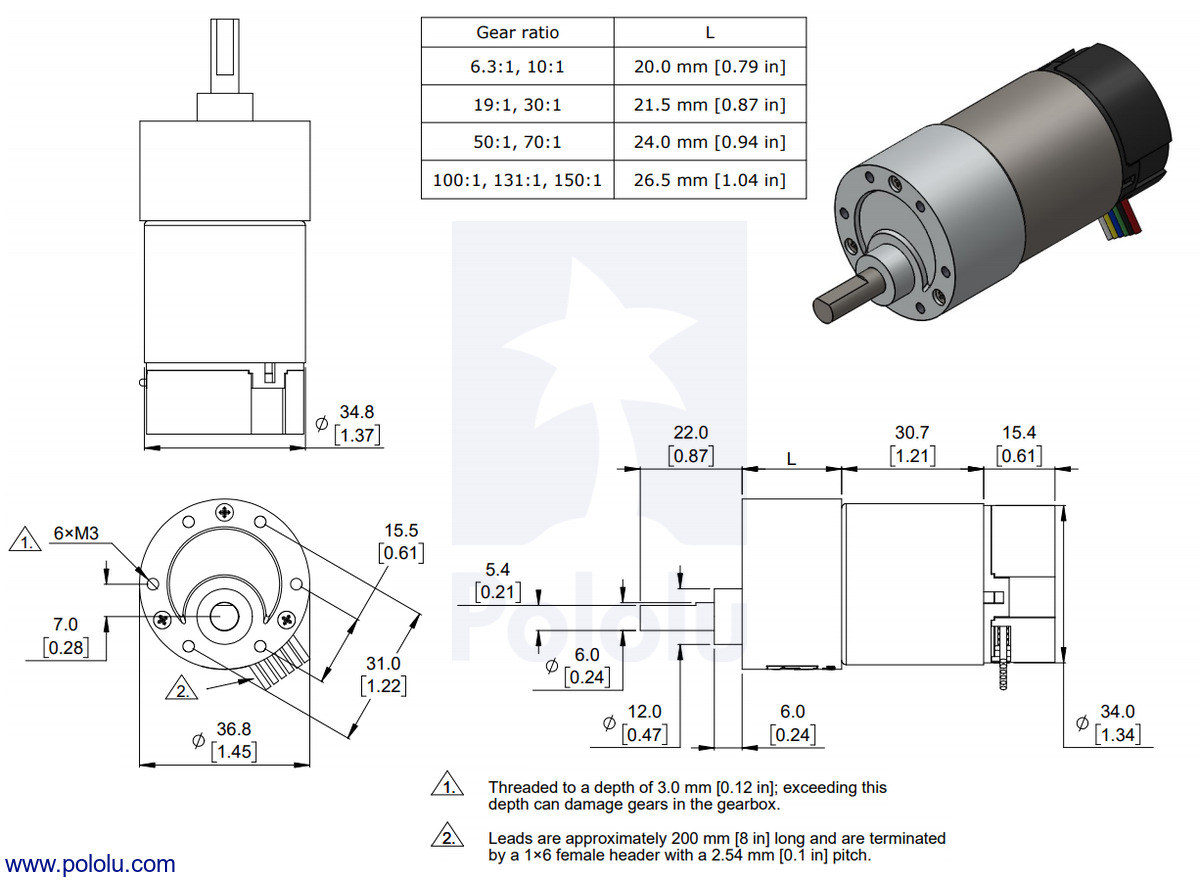
Dimensions of the 37D metal gearmotors with 64 CPR encoders. Units are mm over [inches]. |
|---|
| Size: | 37D × 70L mm1 |
|---|---|
| Weight: | 205 g |
| Shaft diameter: | 6 mm2 |
General specifications
| Gear ratio: | 50:1 |
|---|---|
| No-load speed @ 12V: | 200 rpm |
| No-load current @ 12V: | 0.2 A |
| Stall current @ 12V: | 5.5 A3 |
| Stall torque @ 12V: | 21 kg·cm3 |
| Max output power @ 12V: | 10 W |
| No-load speed @ 6V: | 100 rpm4 |
| No-load current @ 6V: | 0.15 A4 |
| Stall current @ 6V: | 3.0 A4 |
| Stall torque @ 6V: | 12 kg·cm4 |
| Motor type: | 12V |
Performance at maximum efficiency
| Max efficiency @ 12V: | 51 % |
|---|---|
| Speed at max efficiency: | 180 rpm |
| Torque at max efficiency: | 2.2 kg·cm |
| Current at max efficiency: | 0.66 A |
| Output power at max efficiency: | 4.0 W |
General specifications
| Lead length: | 20 cm5 |
|---|---|
| Encoders?: | Y |
| Encoder resolution: | 64 CPR |
Notes:
- 1. Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
- 2. D shaft.
- 3. Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
- 4. This motor will run at 6 V but is intended for operation at 12 V.
- 5. May vary by a few centimeters.